本技术根据信息重叠后的影像来制御一群机器人,根据它们的协调变化来实现实际世界指向的内容表现。利用空间分割型可视光通信(PVLC),机器人根据对影像的重叠信息,对自己位置进行推测和制御。本技术的特征是因为在可视影像上重叠投影了不可视信息,无须繁琐的位置配合及校准,标识表示等对影像表现没有任何影响。另外,即使用手拨机器人、机器人排除障碍物等发生,机器人也会在投影空间内,在系统的制御下安定地放置成为可能。其次,因为根据在影像上重叠的信息可同时并列地发送信息,即使使用大量的机器人,送信端的系统负荷并不会增加。我们通过这项技术,把“Physical”的机器人和“Digital”的影像进行无缝统合,从而实现复合现实感系统。因此,不仅是影像,包括同期机器人的动作的内容表现的设计也成为可能。
视频请点击这里 【展示内容】
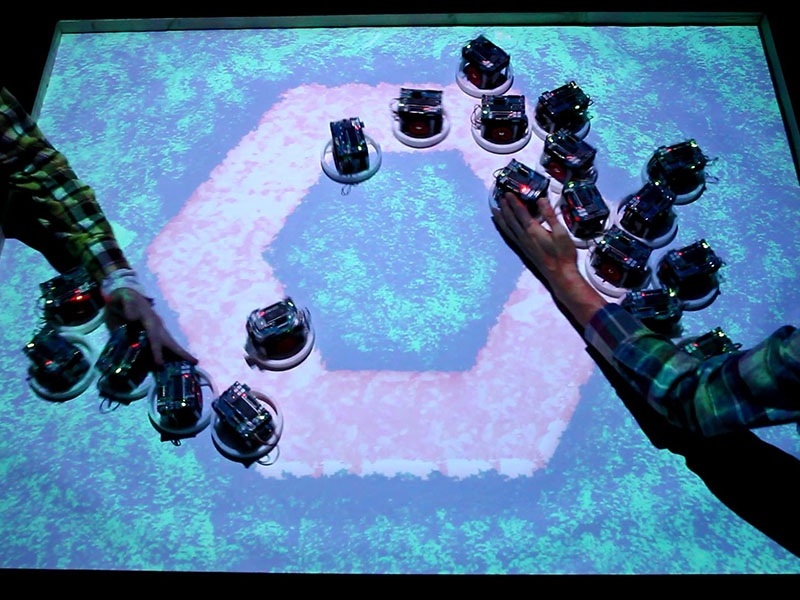
Phygital Field 是一款将“Physical”的群机器人和“Digital”的影像进行融合的内容表现系统。在用投影仪投影的影像全体包含的位置里,因为用这些位置信息来制御机器人,所以即使人为干扰、任意拨动它们,它们也可以快速复原。欢迎来到影像空间中的一群机器人与时间・空间同期并动作来展现的世界,并请务必体验!