技術内容
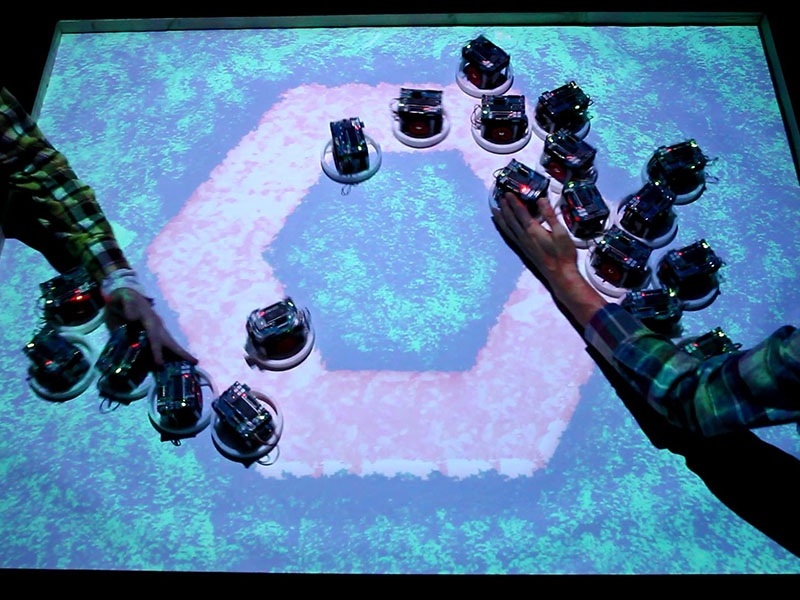
本技術は情報を重畳した映像により群ロボットを制御し、それらが協調して変化することで実世界指向のコンテンツ表現を実現するものです。空間分割型可視光通信(PVLC)を用いて、映像に重畳された情報によるロボットの自己位置推定と制御を行っています。本技術の特徴は可視映像に不可視情報を重畳して投影しているため、煩雑な位置合わせやキャリブレーションが不要であり、マーカの表示などで映像表現を妨げることがないということです。また、ロボットを手で払ったり、ロボットが障害物を押しのけたりといったことを行っても、ロボットが投影空間内にいる限り安定してシステムの制御下に置くことが可能です。そして、映像に重畳した情報によって同時並列的な送信を行うため、大量のロボットを用いても送信側のシステム負荷は増大しません。我々は本技術を通じて、「Physical」なロボットと「Digital」な映像とがシームレスに統合された複合現実感システムを実現し、これにより映像だけでなくそれに同期したロボットの動作まで含めたコンテンツ表現のデザインが可能となりました。動画はこちら