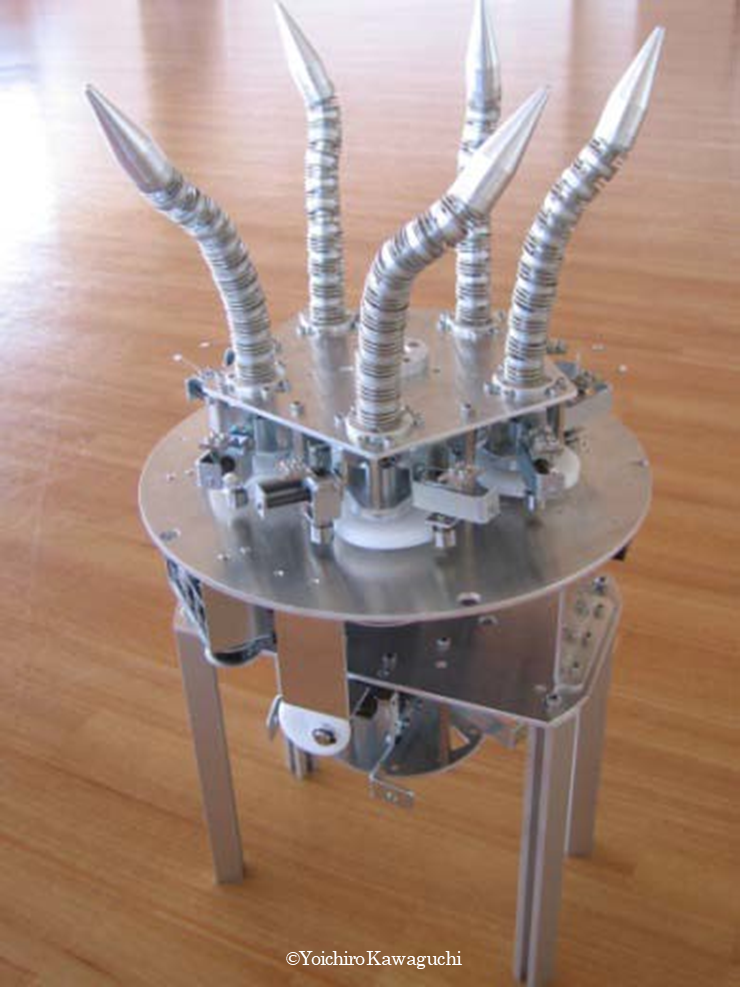
2012.09.10 Innovative Technologies 2012 宙海月-触手ロボット 宙海月-触手ロボット 東京大学大学院 情報学環 河口研究室 採択技術名 宙海月-触手ロボット 採択者名 東京大学大学院 情報学環 河口研究室 採択年 2012年 ※掲載している情報は、受賞当時の情報のため、現在は異なる場合があります。 概要 宙海月ロボットは、CGアーティストを最先端なロボット技術で表現されたものです。生体原理に基づいて設計した触手機構とセンサーを組み合わせて、生き物のようなインタラクティブアートを創出しました。 詳細 宙海月は、CGアーティストを最先端なロボット技術で表現されたものです。我々は、生体原理に基づいて,クラゲロボットの触手を試作しました。ワイヤ、バネと金属プレートで構成された宙海月ロボットの触手は、その三本のワイヤを引っ張ると、触手を実際な生物のように動かせます。生物の触手のメカニズムと近くて、表現力が高いです。さらに、宙海月ロボットは、接近センサーも持って、人間とのインタラクションもできます。人のいない時の寝ている状態から、人が接近すると目を覚ますように動き始めます。我々の提案した手法は、インタラクティブアート作品に対するビジターの満足感を高める効果を期待できます。 審査講評 審査委員 超高精細の芸術的CGの実体化である。実体の仮想化はよくあるが、仮想の実体化は新しい方向性であり、技術的にも興味深い。 Post この記事のタイトルとURLをコピーする 新感覚タッチパネル(リアル触感の実現) 前の記事 2 次元通信によるヒューマンインターフェース 次の記事